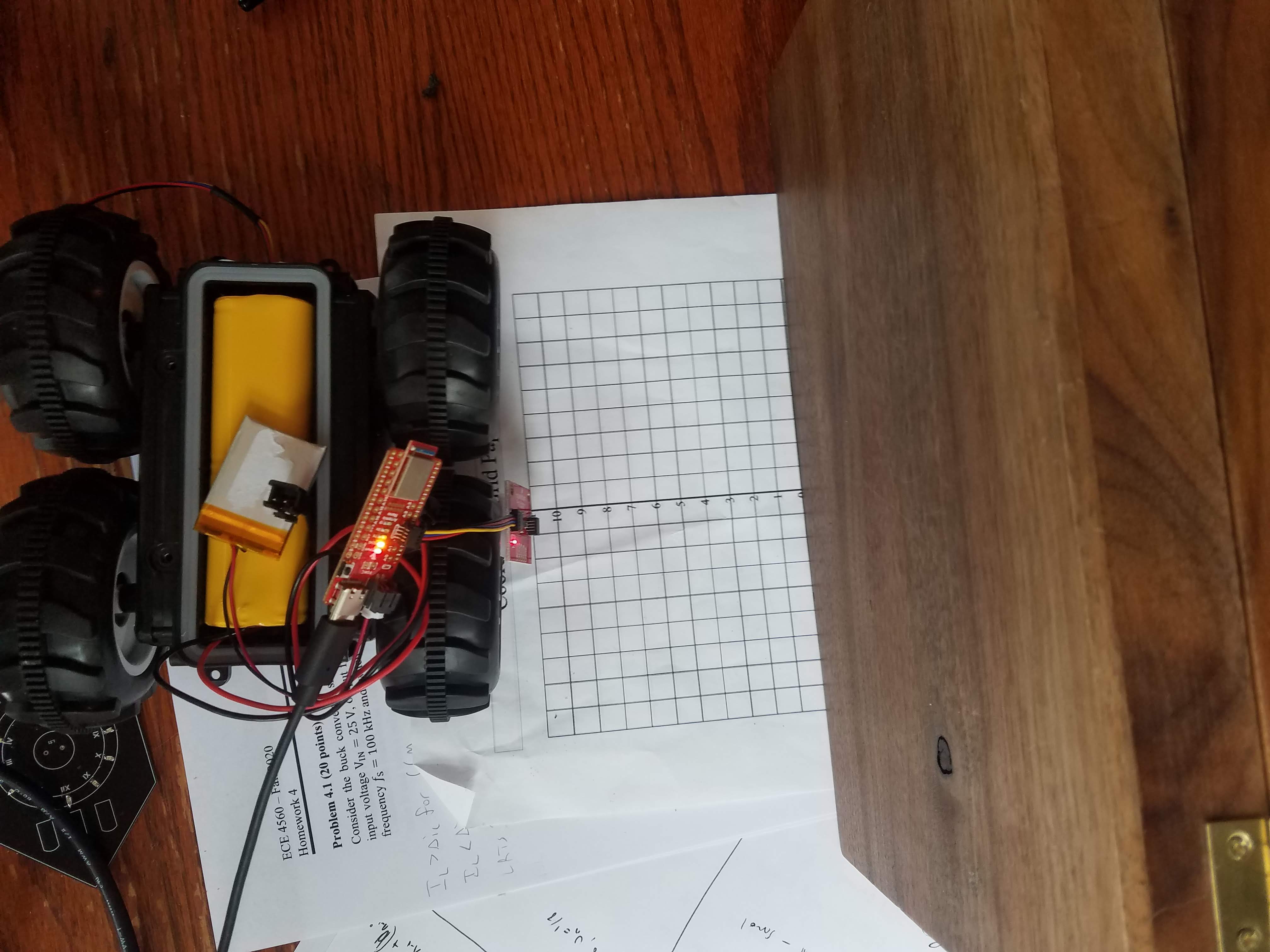
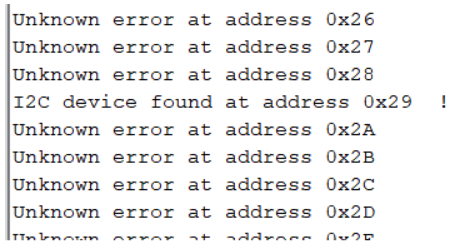
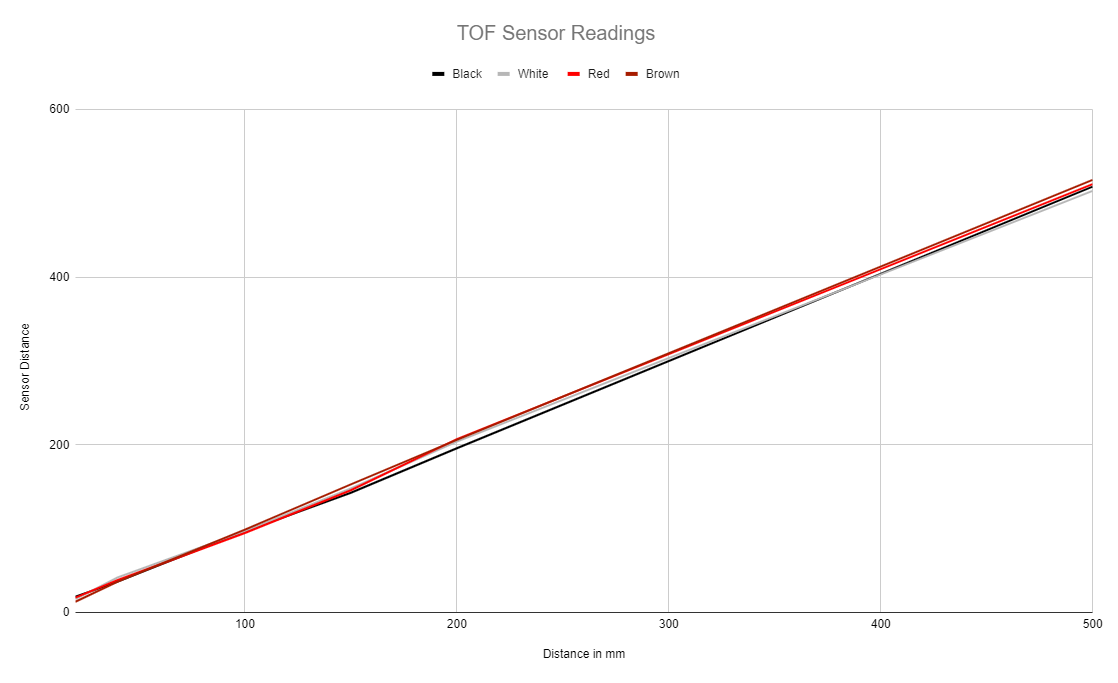
Perform obstacle avoidance with the physical robot using TOF and proximity sensors, on the virtual robot using laser range finder


#include
#include
#include "SCMD.h"
#include "SCMD_config.h" //Contains #defines for common SCMD register names and values
#include "Wire.h"
#include
#include
#include
#include
#include
#include
#include "SparkFun_VL53L1X.h" //Click here to get the library: http://librarymanager/All#SparkFun_VL53L1X
SCMD myMotorDriver; //This creates the main object of one motor driver and connected slaves.
SFEVL53L1X distanceSensor;
void setup(void)
{
Wire.begin();
Serial.begin(115200);
Serial.println("VL53L1X Qwiic Test");
myMotorDriver.settings.commInterface = I2C_MODE;
myMotorDriver.settings.I2CAddress = 0x5D; //config pattern "0101" on board for address 0x5A
//*****initialize the driver get wait for idle*****//
while ( myMotorDriver.begin() != 0xA9 ) //Wait until a valid ID word is returned
{
Serial.println( "ID mismatch, trying again" );
delay(500);
}
Serial.println( "ID matches 0xA9" );
while ( myMotorDriver.ready() == false );
while ( myMotorDriver.busy() );
myMotorDriver.enable();
if (distanceSensor.begin() != 0) //Begin returns 0 on a good init
{
Serial.println("Sensor failed to begin. Please check wiring. Freezing...");
while (1)
;
}
distanceSensor.setOffset(24);
Serial.println("Sensor online!");
distanceSensor.setTimingBudgetInMs(20);
distanceSensor.setIntermeasurementPeriod(35);
distanceSensor.setDistanceModeShort();
}
void loop(void)
{
distanceSensor.startRanging(); //Write configuration bytes to initiate measurement
while (!distanceSensor.checkForDataReady())
{
delay(1);
}
int distance = distanceSensor.getDistance(); //Get the result of the measurement from the sensor
distanceSensor.clearInterrupt();
distanceSensor.stopRanging();
if(distance>300){
myMotorDriver.setDrive( 1, 1, 150);
myMotorDriver.setDrive( 0, 0, 150);
//delay(100);
}
else{
myMotorDriver.setDrive( 1, 0, 50);
myMotorDriver.setDrive( 0, 1, 50);
delay(100);
myMotorDriver.setDrive( 1, 0, 0);
myMotorDriver.setDrive( 0, 1, 0);
//delay(100);
}
Serial.println();
}
def perform_obstacle_avoidance(robot):
while True:
robot.set_vel(0, 0)
if (robot.get_laser_data() < .7):
robot.set_vel(0,2)
time.sleep(.4)
else:
robot.set_vel(.5, 0)
time.sleep(.1)
perform_obstacle_avoidance(robot)