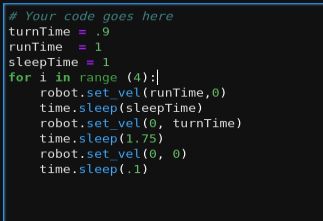
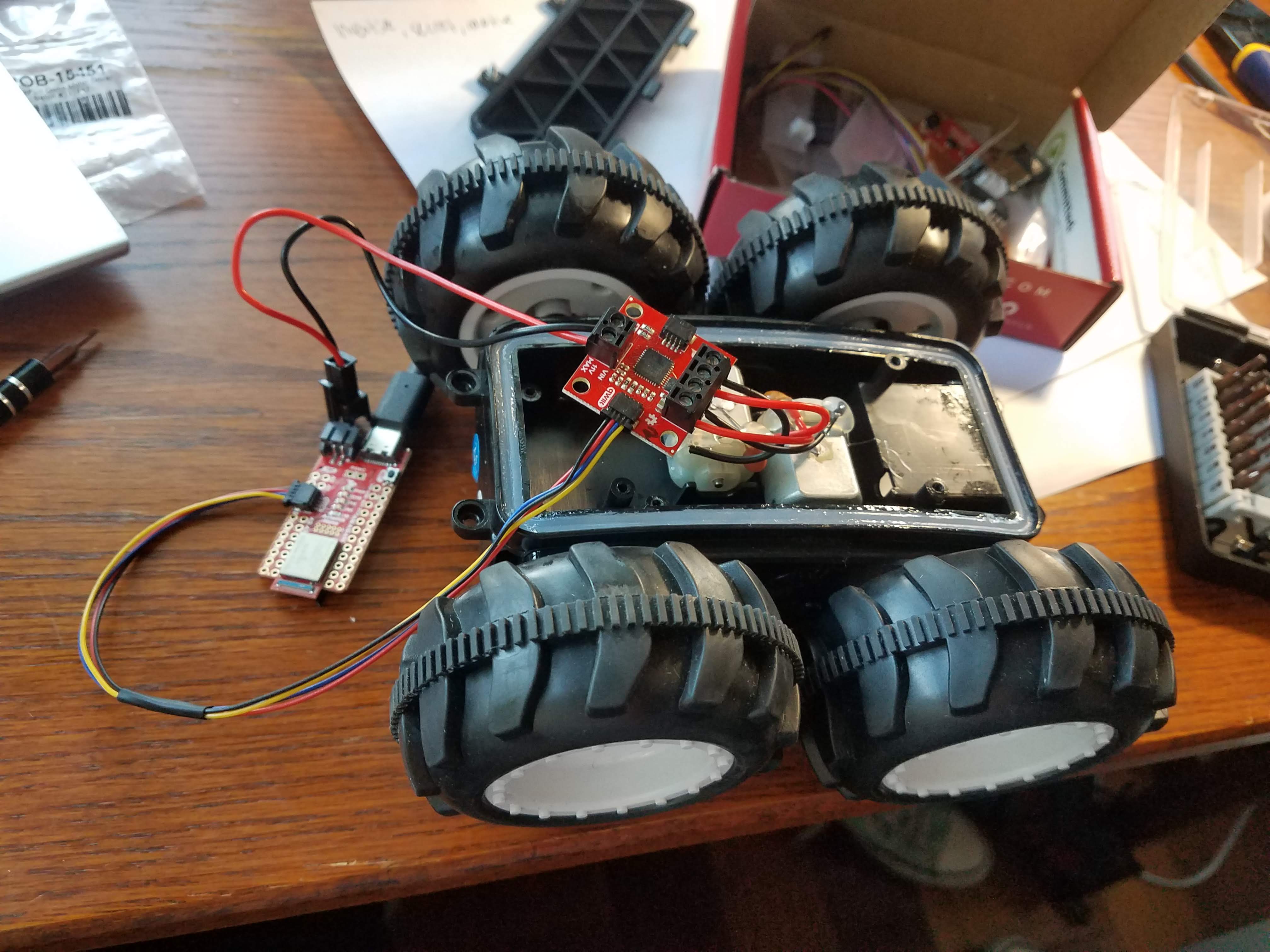
Get the motors running on the robot with our motor controller, simulate in a virtual environment
myMotorDriver.setDrive( 1, 1, 50);
myMotorDriver.setDrive( 0, 0, 50);
Serial.printf("Loudest frequency: %d \n", ui32LoudestFrequency);
if (ui32LoudestFrequency > 4000) {
digitalWrite(LED_BUILTIN, HIGH);
myMotorDriver.setDrive( 1, 1, 70);
myMotorDriver.setDrive( 0, 0, 70);
//delay(250);
}
else {
digitalWrite(LED_BUILTIN, LOW);
myMotorDriver.setDrive( 1, 1, 0);
myMotorDriver.setDrive( 0, 0, 0);
//delay(250);
}