For this section I worked with Jade and Emily to characterize our RC cars in Phillips Hall.
We measured the car to be around 5.5x6.25x4.75 in, with a wheel diameter of around 3in
The battery took around 5-6 hours to charge, hard to say because we weren't watching it right as it was finished. The battery life ranged depending on if we were using fast or slow mode, and how frequently we were moving the car around. Because we were filming, taking data, and moving the car around for different tests, they lasted around 20-30 mins, but would have been less if we were running continuously.
We next measured the speed by setting up a 30 ft track and going down it as fast as we could. Because it only appeared to take 1-2 squares (in Phillips hall all the tiles are 1ft across), we figured 30ft with the accuracy we were getting of just using a stop watch would be enough to neglect acceleration times.
Between 5 repeated tests of this distance we measured the velocity to be about 2.4m/s
We tried to measure acceleration by taking videos in both real time and slo-mo, but the time precision was not great enough for meaningful data. We believe that once we set up the distance sensors, it will be much easier to calculate this by accelerating away from a wall and measuring data directly.
In slow mode, we measured breaking distance 5 times for an average of 5.2 inches, by applying the breaks at the beginning of a ruler. It was near impossible to measure breaking speed in fast mode because the robot would just flip over.
We tested the robot and it ran fine on grass, carpet, concrete, and peet as well as tile.
The robot can flip forward and backwards, recover from "turtling", and can run on only its two side wheels. It was not super reliable for flipping over, we could get it maybe 1/3 times, but I'm also not a great RC controller.
The robot can turn on its axis quite reliably and doesn't slip more than a few mm per rotation, on a hard surface.
We also tried to reliably reach every point on a 3x3ft square, which was very difficult even in slow mode. Here is a comparison of my square vs Jade's
3B: Simulate the Car
Next, I simulated the car in the provided simulation. It was easy to set up with no issues encountered along the way.
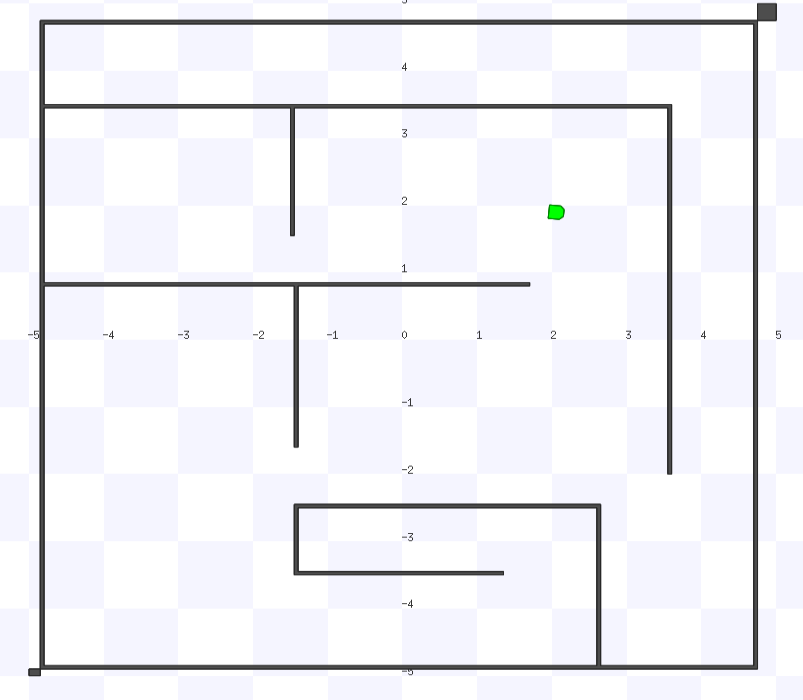
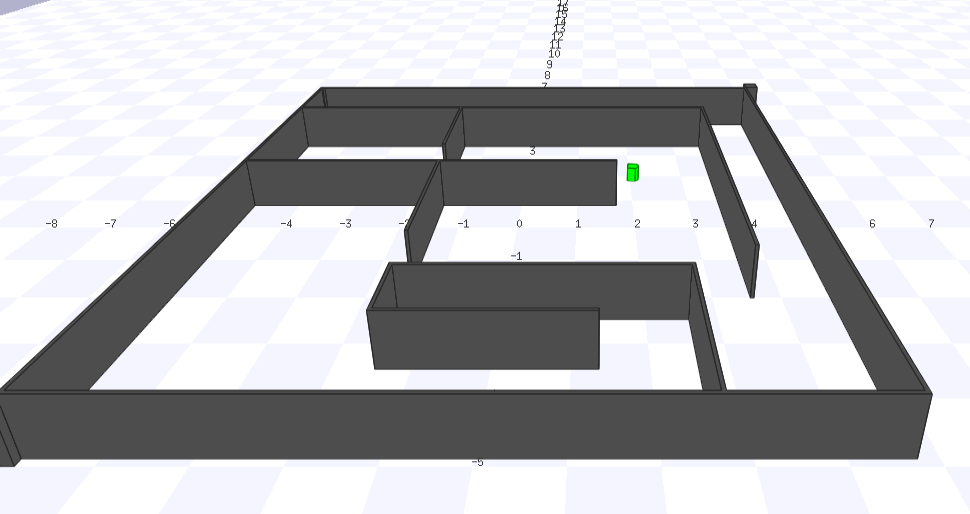
The simulation could be viewed in either 2 or 3D.
I got the keyboard control up and running to test different speeds and navigating around the maze. It was difficult when speeding up a lot to not crash into walls. The robot we have can crash into walls and just bounce off, so the simulation isn't exactly matched to reality
I found that the reset button in the simulation doesn't actually work, and you have to fully close and reopen the program to start the robot back in the center as it starts.
Even with keyboard control, the robot could be taken over with the mouse, which would override keyboard input.
There didn't seem to be a lower limit for how slowly the robot could move either linearly or by angle. you could just keep decreasing by 10% seemingly forever; I got to 10^-21 and stopped.
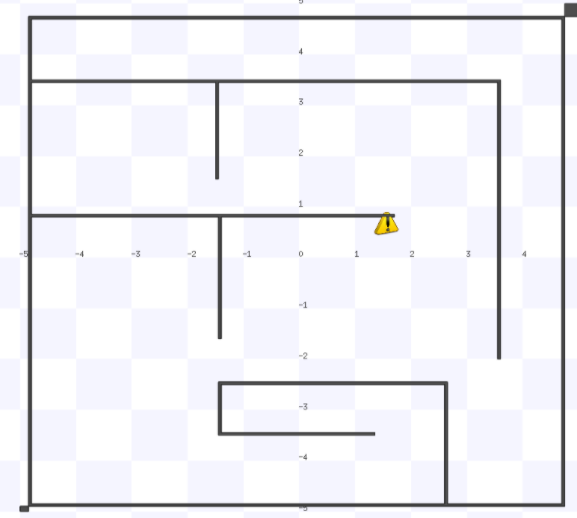
Below is a video of the robot moving around the maze in 3D the crashing