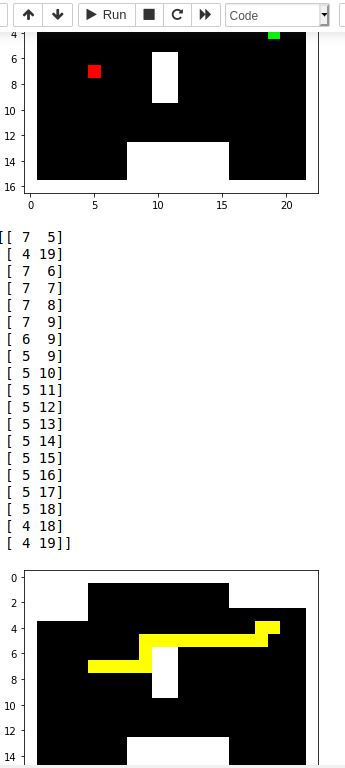
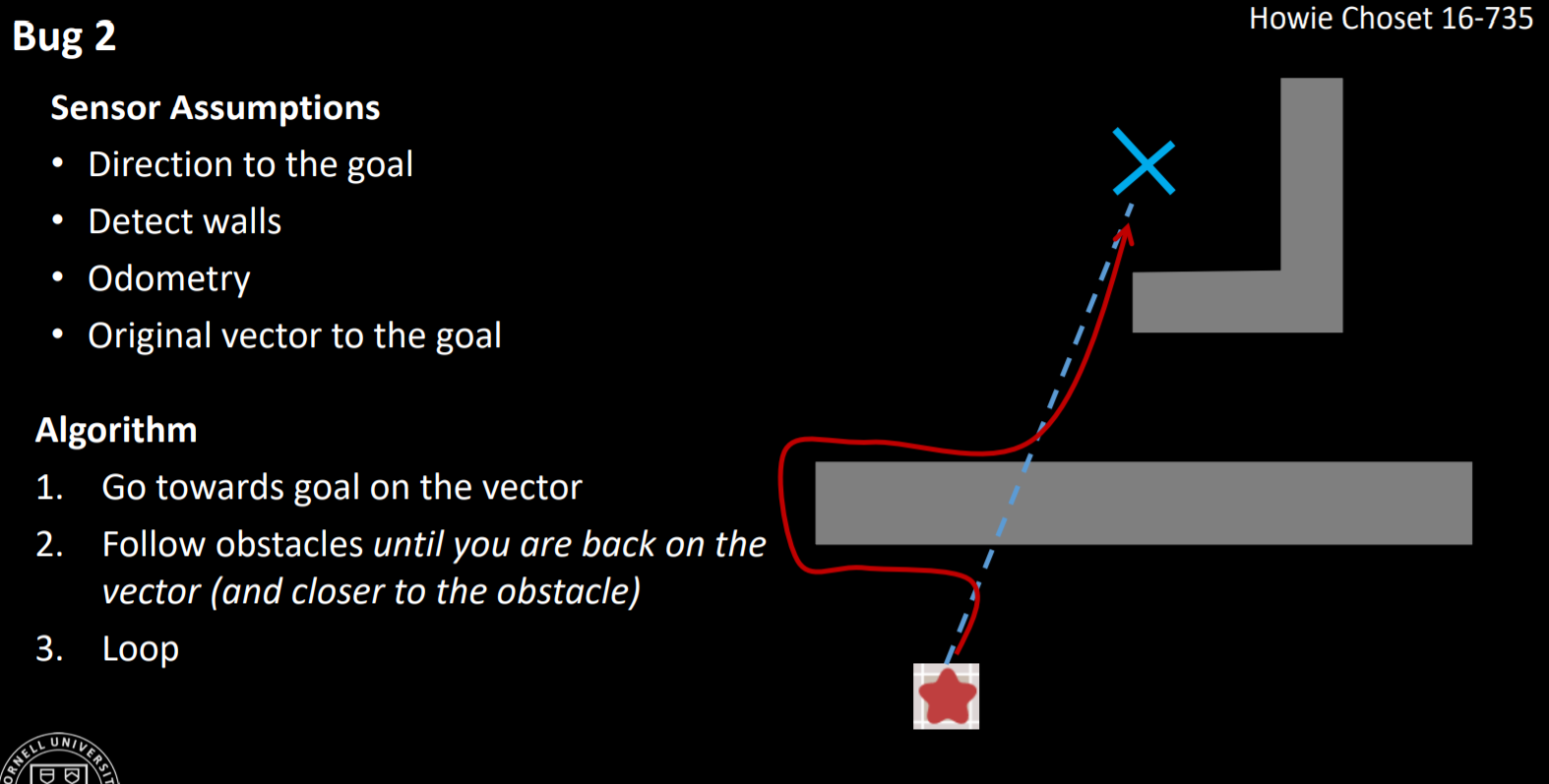
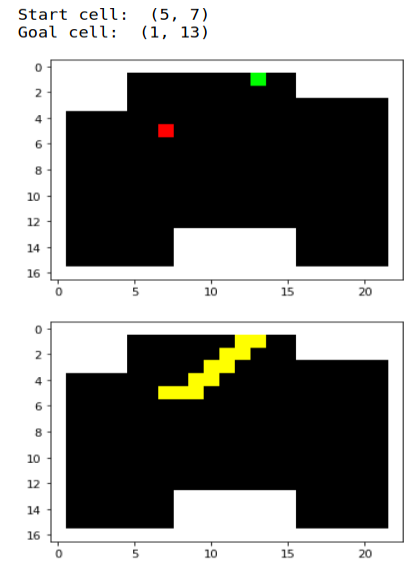
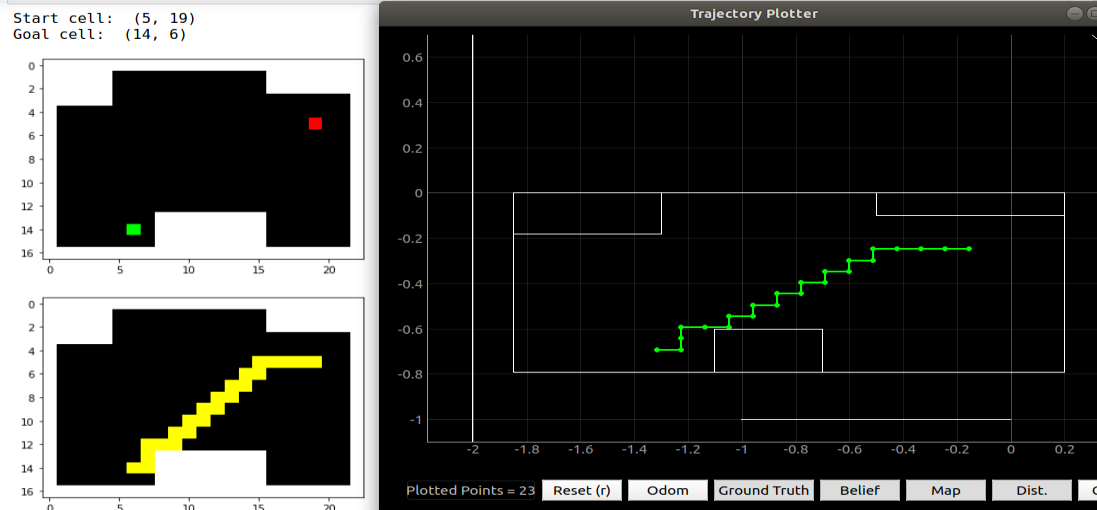
The objective of this lab was to incorporate old labs and accomplish navigation and planning both in simulation and on the physical robot, ideally using things from previous labs.
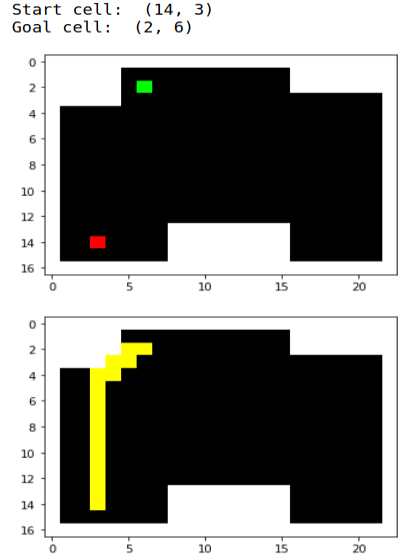
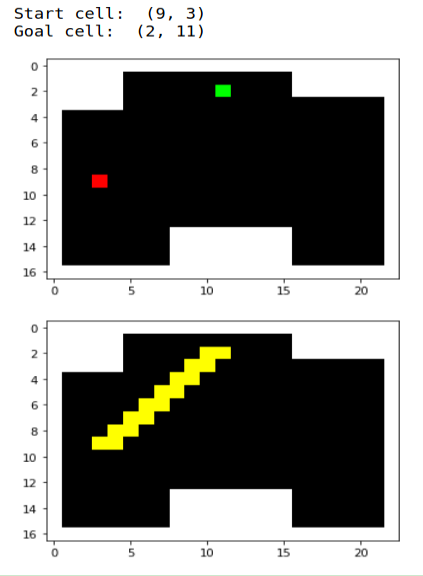
def add_line(self, currPoints, goalPoints):
deltaX = -currPoints[1] + goalPoints[1]
deltaY = -currPoints[0] + goalPoints[0]
if (abs(deltaX) > abs(deltaY)):
if(deltaX > 0): #positive delta
if(self.grid[currPoints[0], currPoints[1]+1] == 1): #obstacle that way
delta_out = self.follow_wall(currPoints, goalPoints, 0) #todo: implement
return delta_out
else: #no obstacle, go that way
return currPoints[0], currPoints[1]+1
else: #negative delta
if(self.grid[currPoints[0], currPoints[1]-1] == 1): #obstacle that way
delta_out = self.follow_wall(currPoints, goalPoints, 1) #todo: implement
return delta_out
else: #no obstacle, go that way
return currPoints[0], currPoints[1]-1
else:
if(deltaY > 0): #positive delta
if(self.grid[currPoints[0]+1, currPoints[1]] == 1): #obstacle that way
delta_out = self.follow_wall(currPoints, goalPoints, 2) #todo: implement
return delta_out
else: #no obstacle, go that way
return currPoints[0]+1, currPoints[1]
else: #negative delta
if(self.grid[currPoints[0]-1, currPoints[1]] == 1): #obstacle that way
delta_out = self.follow_wall(currPoints, goalPoints, 3) #todo: implement
return delta_out
else: #no obstacle, go that way
return currPoints[0]-1, currPoints[1]
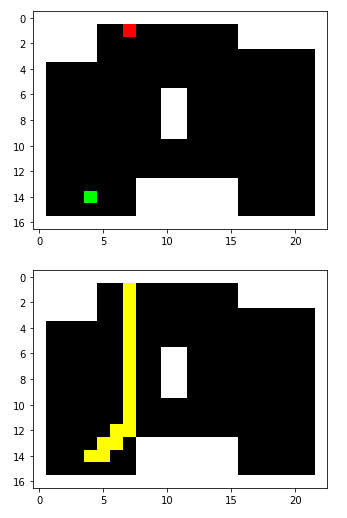
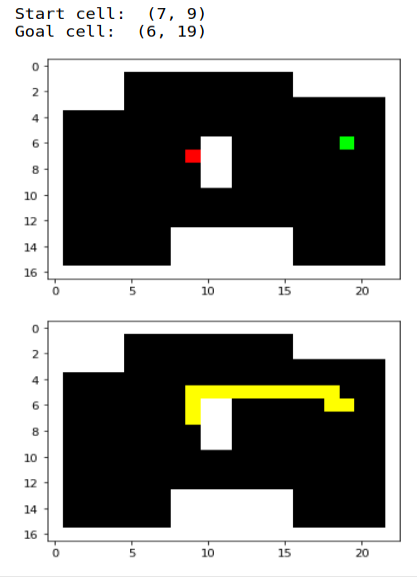
def follow_wall(self, currPoints, goalPoints, moveDir):
deltaX = -currPoints[1] + goalPoints[1]
deltaY = -currPoints[0] + goalPoints[0]
leftWall = self.grid[currPoints[0], currPoints[1]-1] == 1
rightWall = self.grid[currPoints[0], currPoints[1]+1] == 1
topWall = self.grid[currPoints[0]-1, currPoints[1]] == 1
bottomWall = self.grid[currPoints[0]+1, currPoints[1]] == 1
############################################################
if(moveDir == 0): #right wall
if(deltaY>0): #goal below
if(not bottomWall):
return currPoints[0]+1, currPoints[1] #move down
elif (not leftWall):
return currPoints[0], currPoints[1]-1 #move left
else:
return currPoints[0]-1, currPoints[1] #move up
else: #goal above
if(not topWall):
return currPoints[0]-1, currPoints[1] #move up
elif (not leftWall):
return currPoints[0], currPoints[1]-1 #move left
else:
return currPoints[0]+1, currPoints[1] #move down
stepY = (interm_steps[i+1][0]*-.79/16)*2;
stepX = (interm_steps[i+1][1]*(2.05/23)-1.85)*2;
# Reset Plots
robot.reset()
loc.plotter.reset_plot()
for i in range(len(interm_steps)):
#print(interm_steps[i])
nextStepY = (interm_steps[i][0]*-.79/16)*2;
nextStepX = (interm_steps[i][1]*(2.05/23)-1.85)*2;
loc.plotter.plot_point(nextStepX, nextStepY, GT)
if(i is not len(interm_steps)-1):
stepY = (interm_steps[i+1][0]*-.79/16)*2;
stepX = (interm_steps[i+1][1]*(2.05/23)-1.85)*2;
move_to_next((nextStepX,nextStepY, 0), (stepX,stepY, 0))
loc.plotter.plot_point(robot.get_gt_pose()[0], robot.get_gt_pose()[1], ODOM)
def move_to_next(currPos, nextPos):
deltaX = nextPos [0] - currPos[0]
deltaY = nextPos [1] - currPos[1]
if(currPos[0]>nextPos[0]): #moving left
print("moving left")
nextAng = 180;
robot.set_vel(0,.1)
while(round(robot.get_gt_pose()[2]) != nextAng): #wait till it gets to the right angle
robot.set_vel(.1,0)
while(round(robot.get_gt_pose()[0],1) != round(nextPos[0], 1)): #wait till it gets to the right distance
robot.set_vel(0,0)

void loop()
{
setMotors(0, 0);
for(int i = 0; i<len(movePoints); i ++){ //till penultimate row
moveToPoint(i, movePoints[i][1], movePoints[i][0], movePoints[i+1][1], movePoints[i+1][0] ); //number, currX, currY, nextX, nextY
}
///returns current value of yaw
int getYaw(){
while(not(myICM.dataReady())){}
if( myICM.dataReady() ){
//Read yaw data
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
dt = (millis()-lastRead)/1000;
lastRead = millis();
yaw_g = yaw_g+myICM.gyrZ()*dt;
int normyaw = -1;
//normalize the angle
if(yaw_g < 0){
while(normyaw<0){
normyaw = yaw_g + 360;
}
}
else{
normyaw = yaw_g;
}
//Serial.print("Yaw:");
//Serial.println(yaw_g);
return(int(yaw_g));
}
}
void setMotors(int motor1, int motor2){
myMotorDriver.setDrive( 1, 1, motor1);
myMotorDriver.setDrive( 0, 1, motor2);
}
int getDist(){
distanceSensor.startRanging(); //Write configuration bytes to initiate measurement
distance = distanceSensor.getDistance(); //Get the result of the measurement from the sensor
distanceSensor.clearInterrupt();
distanceSensor.stopRanging();
//Serial.print("Distance(mm): ");
//Serial.println(distance);
return distance;
}
void moveToPoint(int i, int currX, int currY, int nextX, int nextY){
if(currX&lf;nextX){ //moving left
Serial.print("moving left");
nextAng = 180;
///////Turn left///////
setMotors(motorSpeed, -motorSpeed);
while(currAngle != nextAng){
currAngle = getYaw();
delay(10);
} //wait till it gets to the right angle
Serial.println("angle correct");
startDist = getDist();
setMotors(motorSpeed, motorSpeed);
while(currDist >= startDist - blockDistX){
currDist = getDist();
} //wait till it gets to the right distance
setMotors(0, 0);
}
}
setMotors(motorSpeed, 0);
if(dirStatus == 1) { delay(spinTime*3);} //were up, going left
else if(dirStatus == 2) { delay(spinTime*2);} //were right, going left
else if(dirStatus == 3) { delay(spinTime);} //were down, going left
dirStatus = 0;